OpenVINO™ Explainable AI Toolkit User Guide#
OpenVINO™ Explainable AI (XAI) Toolkit provides a suite of XAI algorithms for visual explanation of OpenVINO™ Intermediate Representation (IR) models. Model explanation helps to identify the parts of the input that are responsible for the model’s prediction, which is useful for analyzing model’s performance.
Current tutorial is primarily for classification CNNs.
OpenVINO XAI API documentation can be found here.
Content:
OpenVINO XAI Architecture#

OpenVINO XAI provides the API to explain models, using two types of methods:
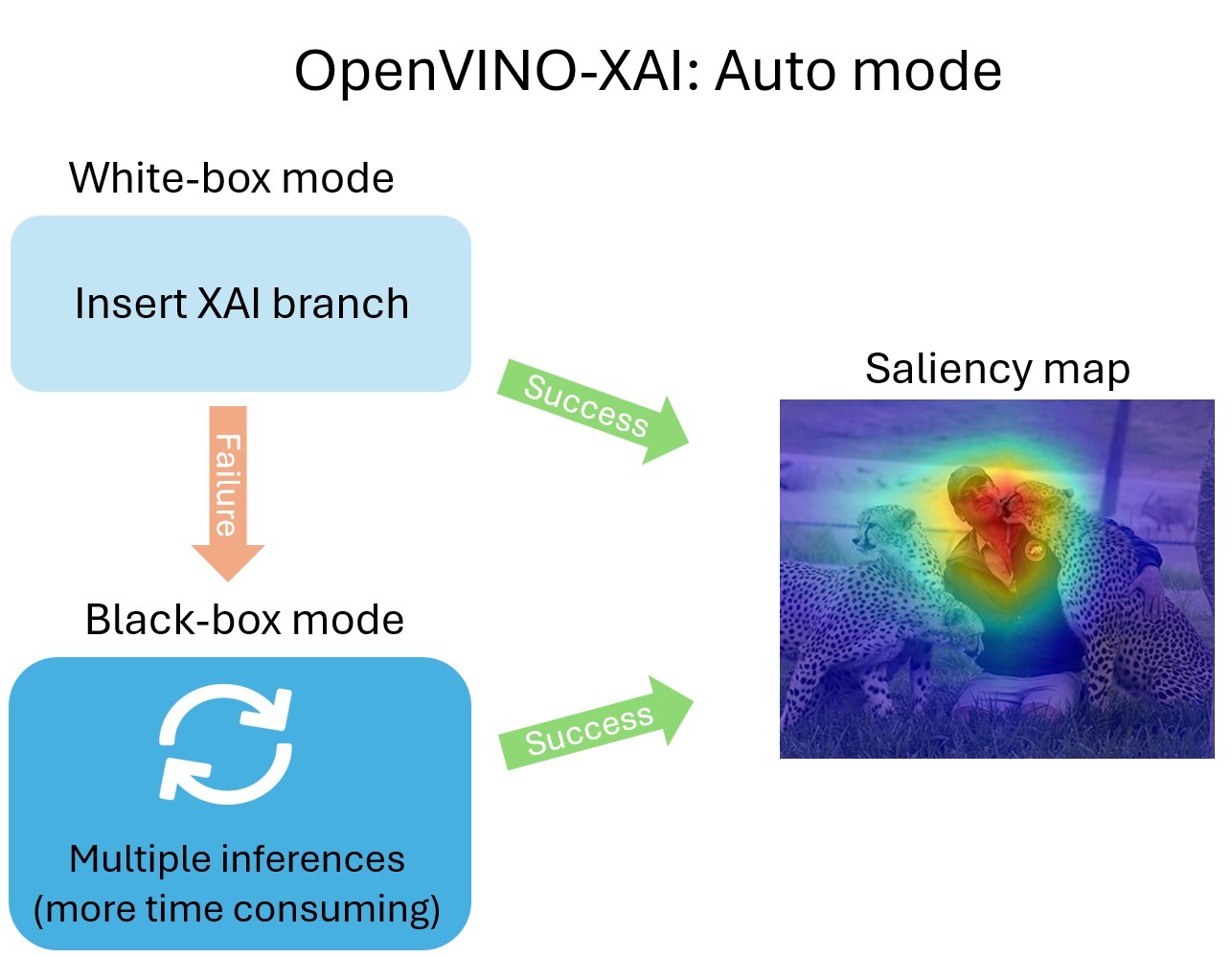
White-box - treats the model as a white box, making inner modifications and adding an extra XAI branch. This results in additional output from the model and relatively fast explanations.
Black-box - treats the model as a black box, working on a wide range of models. However, it requires many more inference runs.
Explainer: the main interface to XAI algorithms#
In a nutshell, the explanation call looks like this:
import openvino_xai as xai
explainer = xai.Explainer(model=model, task=xai.Task.CLASSIFICATION)
explanation = explainer(data)
There are a few options for the model formats. The major use-case is to load OpenVINO IR model from file and pass ov.Model instance to explainer.
Create Explainer for OpenVINO Model instance#
import openvino as ov
model = ov.Core().read_model("model.xml")
explainer = xai.Explainer(
model=model,
task=xai.Task.CLASSIFICATION
)
Create Explainer from OpenVINO IR file#
The Explainer also supports the OpenVINO IR (Intermediate Representation) file format (.xml) directly like follows:
explainer = xai.Explainer(
model="model.xml",
task=xai.Task.CLASSIFICATION
)
Create Explainer from ONNX model file#
ONNX is an open format built to represent machine learning models. The OpenVINO Runtime supports loading and inference of the ONNX models, and so does OpenVINO XAI.
explainer = xai.Explainer(
model="model.onnx",
task=xai.Task.CLASSIFICATION
)
Basic usage: Auto mode#
The easiest way to run the explainer is in Auto mode. Under the hood, Auto mode will try to run in White-Box mode first. If it fails, it will run in Black-Box mode.
Learn more details about White-Box and Black-Box modes below.
Generating saliency maps involves model inference. Explainer will perform model inference but to do it, it requires preprocess_fn and postprocess_fn.
Running without preprocess_fn#
Here’s the example how we can avoid passing preprocess_fn by preprocessing data beforehand (like resizing and adding a batch dimension).
import cv2
import numpy as np
from typing import Mapping
import openvino.runtime as ov
import openvino_xai as xai
def postprocess_fn(x: Mapping):
# Implementing our own post-process function based on the model's implementation
# Return "logits" model output
return x["logits"]
# Create ov.Model
model = ov.Core().read_model("path/to/model.xml") # type: ov.Model
# Explainer object will prepare and load the model once in the beginning
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
postprocess_fn=postprocess_fn,
)
# Generate and process saliency maps (as many as required, sequentially)
image = cv2.imread("path/to/image.jpg")
# Pre-process the image as the model requires (resizing and adding a batch dimension)
preprocessed_image = cv2.resize(src=image, dsize=(224, 224))
preprocessed_image = np.expand_dims(preprocessed_image, 0)
# Run explanation
explanation = explainer(
preprocessed_image,
targets=[11, 14], # indices or string labels to explain
overlay=True, # False by default
original_input_image=image, # to apply overlay on the original image instead of the preprocessed one that was used for the explainer
)
# Save saliency maps
explanation.save("output_path", "name_")
Specifying preprocess_fn#
import cv2
import numpy as np
from typing import Mapping
import openvino.runtime as ov
import openvino_xai as xai
def preprocess_fn(x: np.ndarray) -> np.ndarray:
# Implementing our own pre-process function based on the model's implementation
x = cv2.resize(src=x, dsize=(224, 224))
x = np.expand_dims(x, 0)
return x
def postprocess_fn(x: Mapping):
# Implementing our own post-process function based on the model's implementation
# Return "logits" model output
return x["logits"]
# Create ov.Model
model = ov.Core().read_model("path/to/model.xml") # type: ov.Model
# The Explainer object will prepare and load the model once in the beginning
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
preprocess_fn=preprocess_fn,
postprocess_fn=postprocess_fn,
)
# Generate and process saliency maps (as many as required, sequentially)
image = cv2.imread("path/to/image.jpg")
# Run explanation
explanation = explainer(
image,
targets=[11, 14], # indices or string labels to explain
)
# Save saliency maps
explanation.save("output_path", "name_")
White-Box mode#
White-box mode involves two steps: updating the OV model and then running the updated model.
The updated model has an extra XAI branch resulting in an additional saliency_map output. This XAI branch creates saliency maps during the model’s inference. The computational load from the XAI branch varies depending on the white-box algorithm, but it’s usually quite small.
You need to pass either preprocess_fn or already preprocessed images to run the explainer in white-box mode.
import cv2
import numpy as np
import openvino.runtime as ov
import openvino_xai as xai
from openvino_xai.explainer import ExplainMode
def preprocess_fn(x: np.ndarray) -> np.ndarray:
# Implementing own pre-process function based on the model's implementation
x = cv2.resize(src=x, dsize=(224, 224))
x = np.expand_dims(x, 0)
return x
# Create ov.Model
model = ov.Core().read_model("path/to/model.xml") # type: ov.Model
# The Explainer object will prepare and load the model once at the beginning
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
preprocess_fn=preprocess_fn,
explain_mode=ExplainMode.WHITEBOX,
)
# Generate and process saliency maps (as many as required, sequentially)
image = cv2.imread("path/to/image.jpg")
voc_labels = [
'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable',
'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'
]
# Run explanation
explanation = explainer(
image,
# target_layer="last_conv_node_name", # target_layer - node after which the XAI branch will be inserted, usually the last convolutional layer in the backbone
embed_scaling=True, # True by default. If set to True, the saliency map scale (0 ~ 255) operation is embedded in the model
explain_method=xai.Method.RECIPROCAM, # ReciproCAM is the default XAI method for CNNs
label_names=voc_labels,
targets=[11, 14], # target classes to explain, also ['dog', 'person'] is a valid input, since label_names are provided
overlay=True, # False by default
)
# Save saliency maps
explanation.save("output_path", "name_")
Black-Box mode#
Black-box mode does not update the model (treating the model as a black box). Black-box approaches are based on the perturbation of the input data and measurement of the model’s output change.
For black-box mode we support 2 algorithms: AISE (by default) and RISE. AISE is more effective for generating saliency maps for a few specific classes. RISE - to generate maps for all classes at once. AISE is supported for both classification and detection task.
Pros:
Flexible - can be applied to any custom model. Cons:
Computational overhead - black-box requires hundreds or thousands of forward passes.
preprocess_fn (or preprocessed images) and postprocess_fn are required to be provided by the user for black-box mode.
import cv2
import numpy as np
import openvino.runtime as ov
import openvino_xai as xai
from openvino_xai.explainer import ExplainMode
def preprocess_fn(x: np.ndarray) -> np.ndarray:
# Implementing our own pre-process function based on the model's implementation
x = cv2.resize(src=x, dsize=(224, 224))
x = np.expand_dims(x, 0)
return x
# Create ov.Model
model = ov.Core().read_model("path/to/model.xml") # type: ov.Model
# The Explainer object will prepare and load the model once at the beginning
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
preprocess_fn=preprocess_fn,
explain_mode=ExplainMode.BLACKBOX,
)
# Generate and process saliency maps (as many as required, sequentially)
image = cv2.imread("path/to/image.jpg")
# Run explanation
explanation = explainer(
image,
targets=[11, 14], # target classes to explain
# targets=-1, # explain all classes
overlay=True, # False by default
)
# Save saliency maps
explanation.save("output_path", "name_")
XAI insertion (white-box usage)#
As mentioned above, saliency map generation requires model inference. In the above use cases, OpenVINO XAI performs model inference using provided processing functions. An alternative approach is to use XAI to insert the XAI branch into the model and infer it in the original pipeline.
insert_xai() API is used for insertion.
Note: The original model outputs are not affected, and the model should be inferable by the original inference pipeline.
import cv2
import openvino.runtime as ov
import openvino_xai as xai
from openvino_xai.explainer.visualizer import colormap, overlay
# Create an ov.Model
model: ov.Model = ov.Core().read_model("path/to/model.xml")
# Get and preprocess image
image = cv2.imread("path/to/image.jpg")
image_norm = preprocess_fn(image)
# Insert XAI branch into the OpenVINO model graph (IR)
model_xai: ov.Model = xai.insert_xai(
model=model,
task=xai.Task.CLASSIFICATION,
# target_layer="last_conv_node_name", # target_layer - the node after which the XAI branch will be inserted, usually the last convolutional layer in the backbone. Defaults to None, by which the target layer is automatically detected
embed_scaling=True, # True by default. If set to True, the saliency map scale (0 ~ 255) operation is embedded in the model
explain_method=xai.Method.RECIPROCAM, # ReciproCAM is the default XAI method for CNNs
)
# Insert XAI branch into the Pytorch model
# XAI head is inserted using the module hook mechanism internally
# so that users could get additional saliency map without major changes in the original inference pipeline.
import torch
model: torch.nn.Module
# Insert XAI head
model_xai: torch.nn.Module = xai.insert_xai(model=model, task=xai.Task.CLASSIFICATION)
# Torch XAI model inference
model_xai.eval()
with torch.no_grad():
outputs = model_xai(torch.from_numpy(image_norm))
logits = outputs["prediction"] # BxC: original model prediction
saliency_maps = outputs["saliency_map"] # BxCxhxw: additional per-class saliency map
probs = torch.softmax(logits, dim=-1)
label = probs.argmax(dim=-1)[0]
# Torch XAI model saliency map
saliency_maps = saliency_maps.numpy(force=True).squeeze(0) # Cxhxw
saliency_map = saliency_maps[label] # hxw saliency_map for the label
saliency_map = cv2.resize(saliency_map, dsize=image.shape[::-1]) # HxW
saliency_map = colormap(saliency_map[None, :]) # 1xHxWx3
result_image = overlay(saliency_map, image)[0] # HxWx3
XAI methods#
Overview#
At the moment, the following XAI methods are supported:
Method |
Using model internals |
Per-target support |
Single-shot |
#Model inferences |
|---|---|---|---|---|
White-Box |
||||
Activation Map |
Yes |
No |
Yes |
1 |
Recipro-CAM |
Yes |
Yes (class) |
Yes* |
1* |
ViT Recipro-CAM |
Yes |
Yes (class) |
Yes* |
1* |
DetClassProbabilityMap |
Yes** |
Yes (class) |
Yes |
1 |
Black-Box |
||||
RISE |
No |
Yes (class) |
No |
1000-10000 |
AISEClassification |
No |
Yes (class) |
No |
120-500 |
AISEDetection |
No |
Yes (bbox) |
No |
60-250 |
* Recipro-CAM re-infers part of the graph (usually neck + head or last transformer block) H*W times, where HxW – feature map size of the target layer.
** DetClassProbabilityMap requires explicit definition of the target layers. The rest of the white-box methods support automatic detection of the target layer.
Target layer is the part of the model graph where XAI branch will be inserted (applicable for white-box methods).
All supported methods are gradient-free, which suits deployment framework settings (e.g. OpenVINO™), where the model is in optimized or compiled representation.
Methods performance-accuracy comparison#
The table below compares accuracy and performace of different models and explain methods (learn more about Quality Metrics).
Metrics were measured on a 10% random subset of the ILSVRC 2012 validation dataset (5000 images, seed 42).
Model |
Explain mode |
Explain method |
Explain time |
Pointing game |
Insertion |
Deletion |
ADCC |
Coherency |
Complexity |
Average Drop |
|||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
deit - tiny (transformer) |
White box |
VIT ReciproCAM |
1* |
89.9 |
22.4 |
4.5 |
70.4 |
88.9 |
38.1 |
34.3 |
|||
Activation map |
1 |
56.6 |
7.8 |
7.0 |
46.9 |
74.0 |
53.7 |
65.4 |
|||||
Black Box** |
AISE |
60 |
73.9 |
15.9 |
8.9 |
66.6 |
73.9 |
44.3 |
26.0 |
||||
RISE |
2000 |
85.5 |
23.2 |
5.8 |
74.8 |
92.5 |
42.3 |
16.6 |
|||||
resnet18 |
White box |
ReciproCAM |
1* |
89.5 |
33.9 |
5.9 |
77.3 |
91.1 |
30.2 |
25.9 |
|||
Activation map |
1 |
87.0 |
36.3 |
10.5 |
74.4 |
97.9 |
25.2 |
40.2 |
|||||
Black Box** |
AISE |
60 |
72.0 |
22.5 |
12.4 |
67.4 |
69.3 |
44.5 |
16.9 |
||||
RISE |
2000 |
87.0 |
34.6 |
7.1 |
77.1 |
93.0 |
42.0 |
8.3 |
* Recipro-CAM re-infers part of the graph (usually neck + head or last transformer block) H*W times, where HxW is the feature map size of the target layer.
** For Black Box Methods preset = SPEED
White-Box methods#
When to use?
When model architecture follows standard CNN-based or ViT-based design (OV-XAI support 1000+ CNN and ViT models).
When speed matters. White-box methods are fast - it takes ~one model inference to generate saliency map.
When it is required to obtain saliency map together with model prediction at the inference server environment. White-box methods update model graph, so that the XAI branch and saliency map output added to the model. Therefore, with a minor compute overhead, it is possible to generate both model predictions and saliency maps.
All white-box methods require access to model internal state. To generate saliency map, supported white-box methods potentially change and process internal model activations in a way that fosters compute efficiency.
Activation Map#
Suitable for:
Binary classification problems (e.g. inspecting model reasoning when predicting a positive class).
Visualization of the global (class-agnostic) model attention (e.g. inspecting which input pixels are the most salient for the model).
Activation Map is the most basic and naive approach. It takes the outputs of the model’s feature extractor (backbone) and averages it in the channel dimension. The results highly rely on the backbone and ignore neck and head computations. Basically, it gives a relatively good and fast result, which highlight the most activated features from the backbone perspective.
Below saliency map was obtained for ResNet-18 from timm:

Recipro-CAM (ViT Recipro-CAM for ViT models)#
Suitable for:
Almost all CNN-based architectures.
Many ViT-based architectures.
Recipro-CAM involves spatially masking of the extracted feature maps to exploit the correlation between activation maps and model predictions for target classes. It is perturbation-based method which perturbs internal model activations.
Assume 7x7 feature map which is extracted by the CNN backbone. One location of the feature map is preserved (e.g. at index [0, 0]), while the rest feature map values is masked out with e.g. zeros (perturbation is the same across channel dimension). Perturbed feature map inferred through the model head. The the model prediction scores are used as saliency scores for index [0, 0]. This is repeated for all 49 spatial location. The final saliency map obtained after resizing and scaling. See paper for more details.
Recipro-CAM is an efficient XAI method.
The main weak point is that saliency for each pixel in the feature map space is estimated in isolation, without taking into account joint contribution of different pixels/features.
Recipro-CAM is the default method for the classification task. ViT Recipro-CAM is a modification of Recipro-CAM for ViT-based models.
Below saliency map was obtained for ResNet-18 from timm and “cheetah” class:
DetClassProbabilityMap#
Suitable for:
Single-stage object detection models.
When it is enough to estimate saliency maps per-class.
DetClassProbabilityMap takes the raw classification head output and uses class probability maps to calculate regions of interest for each class. So, it creates different salience maps for each class. This algorithm is implemented for single-stage detectors only and required explicit list of target layers.
The main limitation of this method is that, due to the training loss design of most single-stage detectors, activation values drift towards the center of the object while propagating through the network. Many object detectors, while being designed to precisely estimate location of the objects, might mess up spatial location of object features in the latent space.
Below saliency map was obtained for YOLOX trained in-house on PASCAL VOC dataset:

Black-Box methods#
When to use?
When custom models are used and/or white-box methods fail (e.g. Swin-based transformers).
When more advanced model explanation is required. See more details below (e.g. in the RISE overview).
When spacial location of the features is messed up in the latent space (e.g. some single-stage object detection models).
All black-box methods are perturbation-based - they perturb the input and register the change in the output. Usually, for high quality saliency map, hundreds or thousands of model inferences required. That is the reason for them to be compute-inefficient. On the other hand, black box methods are model-agnostic.
Given that the quality of the saliency maps usually correlates with the number of available inferences, we propose the following presets for the black-box methods: Preset.SPEED, Preset.BALANCE, Preset.QUALITY (Preset.BALANCE is used by default).
Apart from that, methods parameters can be defined directly via Explainer or Method API.
RISE#
Suitable for:
All classification models which can generate per-class prediction scores.
More flexibility and more advanced use cases (e.g. control of granularity of the saliency map).
RISE probes a model by sub-sampling the input image via random masks and records its response to each of them. RISE creates random masks from down-scaled space (e.g. 7×7 grid) and adds random translation shifts for the pixel-level explanation with further up-sampling. Weighted sum of all sampled masks used to generate the fine-grained saliency map. Since it approximates the true saliency map with Monte Carlo sampling, it requires multiple thousands of forward passes to generate a fine-grained saliency map. RISE is a non-deterministic method. See paper for more details.
RISE generates saliency maps for all classes at once, although indices of target classes can be provided (which might bring some performance boost).
RISE has two main hyperparameter: num_cells (define the resolution of the grid for the masks) and num_masks (defines number of inferences).
Number of cells defines granularity of the saliency map (usually, the higher the granularity - the better). Higher number of cells require more masks to converge. Going from Preset.SPEED to Preset.QUALITY, the number of masks (compute budget) increases.
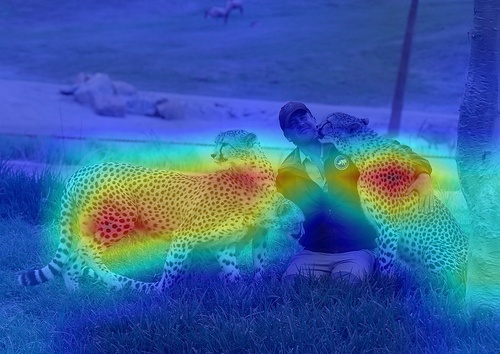
Below saliency map was obtained for ResNet-18 from timm and “cheetah” class (default parameters).

It is possible to see, that some grass-related pixels from the left cheetah also contribute to the cheetah prediction, which might indicates that model learned cheetah features in combination with grass (which makes sense).
AISEClassification#
Suitable for:
All classification models which can generate per-class prediction scores.
Cases when speed matters.
AISE formulates saliency map generation as a kernel density estimation (KDE) problem, and adaptively sample input masks using a derivative-free optimizer to maximize mask saliency score. KDE requires a proper kernel width, which is not known. A set of pre-defined kernel widths is used simultaneously, and the result is them aggregated. This adaptive sampling mechanism improves the efficiency of input mask generation and thus increases convergence speed. AISE is designed to be task-agnostic and can be applied to a wide range of classification and object detection architectures.
AISE is optimized for generating saliency map for a specific class (or a few classes). To specify target classes, use targets argument.
AISEClassification is designed for classification models.
Below saliency map was obtained for ResNet-18 from timm and “cheetah” class:

AISEDetection#
Suitable for:
All detection models which can generate bounding boxes, labels and scores.
When speed matters.
When it is required to get per-box saliency map.
AISEDetection is designed for detection models and support per-bounding box saliency maps.
Below saliency map was obtained for YOLOX trained in-house on PASCAL VOC dataset (with default parameters, Preset.BALANCE):

Plot saliency maps#
To visualize saliency maps, use the explanation.plot function.
The matplotlib backend is more convenient for plotting saliency maps in Jupyter notebooks, as it uses the Matplotlib library. By default it generates the grid with 4 images per row (can be agjusted by num_collumns parameter).
The cv backend is better for visualization in Python scripts, as it opens extra windows to display the generated saliency maps.
import cv2
import numpy as np
import openvino.runtime as ov
import openvino_xai as xai
from openvino_xai.explainer import ExplainMode
def preprocess_fn(image: np.ndarray) -> np.ndarray:
"""Preprocess the input image."""
resized_image = cv2.resize(src=image, dsize=(224, 224))
expanded_image = np.expand_dims(resized_image, 0)
return expanded_image
# Create ov.Model
MODEL_PATH = "path/to/model.xml"
model = ov.Core().read_model(MODEL_PATH) # type: ov.Model
# The Explainer object will prepare and load the model once in the beginning
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
preprocess_fn=preprocess_fn,
explain_mode=ExplainMode.WHITEBOX,
)
voc_labels = [
'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable',
'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'
]
# Generate and process saliency maps (as many as required, sequentially)
image = cv2.imread("path/to/image.jpg")
# Run explanation
explanation = explainer(
image,
label_names=voc_labels,
targets=[7, 11], # ['cat', 'dog'] also possible as target classes to explain
)
# Use matplotlib (recommended for Jupyter) - default backend
explanation.plot() # plot all saliency map
explanation.plot(targets=[7], backend="matplotlib")
explanation.plot(targets=["cat"], backend="matplotlib")
# Plots a grid with 5 images per row
explanation.plot(num_columns=5, backend="matplotlib")
# Use OpenCV (recommended for Python) - will open new windows with saliency maps
explanation.plot(backend="cv") # plot all saliency map
explanation.plot(targets=[7], backend="cv")
explanation.plot(targets=["cat"], backend="cv")
Saving saliency maps#
You can easily save saliency maps with flexible naming options by using a prefix and postfix. The prefix allows saliency maps from the same image to have consistent naming.
The format for naming is:
{prefix} + target_id + {postfix}.jpg
Additionally, you can include the confidence score for each class in the saved saliency map’s name.
{prefix} + target_id + {postfix} + confidence.jpg
import cv2
import numpy as np
import openvino.runtime as ov
from typing import Mapping
import openvino_xai as xai
from openvino_xai.explainer import ExplainMode
def preprocess_fn(image: np.ndarray) -> np.ndarray:
"""Preprocess the input image."""
x = cv2.resize(src=image, dsize=(224, 224))
x = x.transpose((2, 0, 1))
processed_image = np.expand_dims(x, 0)
return processed_image
def postprocess_fn(output: Mapping):
"""Postprocess the model output."""
output = softmax(output)
return output[0]
def softmax(x: np.ndarray) -> np.ndarray:
"""Compute softmax values of x."""
e_x = np.exp(x - np.max(x))
return e_x / e_x.sum()
# Generate and process saliency maps (as many as required, sequentially)
image = cv2.imread("path/to/image.jpg")
# Create ov.Model
MODEL_PATH = "path/to/model.xml"
model = ov.Core().read_model(MODEL_PATH) # type: ov.Model
# The Explainer object will prepare and load the model once in the beginning
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
preprocess_fn=preprocess_fn,
explain_mode=ExplainMode.WHITEBOX,
)
voc_labels = [
'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable',
'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'
]
# Get predicted confidences for the image
compiled_model = core.compile_model(model=model, device_name="AUTO")
logits = compiled_model(preprocess_fn(image))[0]
result_infer = postprocess_fn(logits)
# Generate list of predicted class indices and scores
result_idxs = np.argwhere(result_infer > 0.4).flatten()
result_scores = result_infer[result_idxs]
# Generate dict {class_index: confidence} to save saliency maps
scores_dict = {i: score for i, score in zip(result_idxs, result_scores)}
# Run explanation
explanation = explainer(
image,
label_names=voc_labels,
targets=result_idxs, # target classes to explain
)
# Save saliency maps flexibly
OUTPUT_PATH = "output_path"
explanation.save(OUTPUT_PATH) # aeroplane.jpg
explanation.save(OUTPUT_PATH, "image_name_target_") # image_name_target_aeroplane.jpg
explanation.save(OUTPUT_PATH, prefix="image_name_target_") # image_name_target_aeroplane.jpg
explanation.save(OUTPUT_PATH, postfix="_class_map") # aeroplane_class_map.jpg
explanation.save(OUTPUT_PATH, prefix="image_name_", postfix="_class_map") # image_name_aeroplane_class_map.jpg
# Save saliency maps with confidence scores
explanation.save(
OUTPUT_PATH, prefix="image_name_", postfix="_conf_", confidence_scores=scores_dict
) # image_name_aeroplane_conf_0.85.jpg
Measure quality metrics of saliency maps#
To compare different saliency maps, you can use the implemented quality metrics: Pointing Game, Insertion-Deletion AUC, and ADCC.
ADCC (Average Drop-Coherence-Complexity) (paper/impl) - averages three submetrics:
Average Drop - The percentage drop in confidence when the model sees only the explanation map (image masked with the saliency map) instead of the full image.
Coherence - The coherency between the saliency map on the input image and saliency map on the explanation map (image masked with the saliency map). Requires generating an extra explanation (can be time-consuming for black box methods).
Complexity - Measures the L1 norm of the saliency map (average value per pixel). Fewer important pixels -> less complexity -> better saliency map.
Insertion-Deletion AUC (paper) - Measures the AUC of the curve of model confidence when important pixels are sequentially inserted or deleted. Time-consuming, requires 60 model inferences: 30 steps for insertion and 30 steps for deletion (number of steps is configurable).
Pointing Game (paper/impl) - Returns True if the most important saliency map pixel falls into the object ground truth bounding box. Requires ground truth annotation, so it is convenient to use on public datasets (COCO, VOC, ILSVRC) rather than individual images (check accuracy_tests for examples).
Here is a comparison of the performance time (measured in model inferences) for different accuracy methods. The explain time (also in model inferences) is added along for the better picture.
Explain mode |
Explain method |
Explain time** |
Pointing Game |
Insertion/Deletion AUC |
ADCC |
|---|---|---|---|---|---|
White Box |
Activation map |
1 |
0 |
30 insertion + 30 deletion + 1 to define predicted class and check difference in its score |
2 + 1 explain (1*) |
ReciproCAM |
1* |
0 |
30 insertion + 30 deletion |
2 + 1 explain (1*) |
|
ViT ReciproCAM |
1* |
0 |
30 insertion + 30 deletion |
2 + 1 explain (1*) |
|
Black Box |
AISE-classification |
120-500 |
0 |
30 insertion + 30 deletion |
2 + 1 explain (120-150) |
RISE |
1000-10000 |
0 |
30 insertion + 30 deletion |
2 + 1 explain (1000-10000) |
* Recipro-CAM re-infers part of the graph (usually neck + head or last transformer block) H*W times, where HxW is the feature map size of the target layer.
** All time measurements are in number of model inferences.
import cv2
import numpy as np
import openvino.runtime as ov
from typing import Mapping
import openvino_xai as xai
from openvino_xai.explainer import ExplainMode
from openvino_xai.metrics import ADCC, InsertionDeletionAUC
def preprocess_fn(image: np.ndarray) -> np.ndarray:
"""Preprocess the input image."""
x = cv2.resize(src=image, dsize=(224, 224))
x = x.transpose((2, 0, 1))
processed_image = np.expand_dims(x, 0)
return processed_image
def postprocess_fn(output: Mapping):
"""Postprocess the model output."""
return softmax(output["logits"])
def softmax(x: np.ndarray) -> np.ndarray:
"""Compute softmax values of x."""
e_x = np.exp(x - np.max(x))
return e_x / e_x.sum()
IMAGE_PATH = "path/to/image.jpg"
MODEL_PATH = "path/to/model.xml"
image = cv2.imread(IMAGE_PATH)
model = ov.Core().read_model(MODEL_PATH)
explainer = xai.Explainer(
model,
task=xai.Task.CLASSIFICATION,
preprocess_fn=preprocess_fn,
explain_mode=ExplainMode.WHITEBOX,
explain_method=xai.Method.RECIPROCAM # Also VITRECIPROCAM, AISE, RISE, ACTIVATIONMAP are supported
)
# Generate explanation (if several targets are passed, metrics for all saliency maps will be aggregated)
explanation = explainer(image, targets=14, colormap=False, overlay=False, resize=True)
# Calculate InsertionDeletionAUC metric over the list of explanations and input images
auc = InsertionDeletionAUC(model, preprocess_fn, postprocess_fn)
auc_score = auc.evaluate([explanation], [image], steps=30) # {'insertion': 0.43, 'deletion': 0.09, 'delta': 0.34}
insertion, deletion, delta = auc_score.values()
print(f"Insertion {deletion:.2f}, Deletion {insertion:.2f}, Delta {delta:.2f}")
# Calculate ADCC metric over the list of explanations and input images
adcc = ADCC(model, preprocess_fn, postprocess_fn, explainer)
adcc_score = adcc.evaluate([explanation], [image]) # {'adcc': 0.95, 'coherency': 0.99, 'complexity': 0.13, 'average_drop': 0.0}
adcc, coherency, complexity, average_drop = adcc_score.values()
print(f"ADCC {adcc:.2f}, Coherency {coherency:.2f}, Complexity {complexity:.2f}, Average drop {average_drop:.2f}")
Example scripts#
More usage scenarios that can be used with your own models and images as arguments are available in examples.
# Retrieve models by running tests
# Models are downloaded and stored in .data/otx_models
pytest tests/test_classification.py
# Run a bunch of classification examples
# All outputs will be stored in the corresponding output directory
python examples/run_classification.py .data/otx_models/mlc_mobilenetv3_large_voc.xml
tests/assets/cheetah_person.jpg --output output